Oil-well Drillstring Torsional Vibrations Active Damping
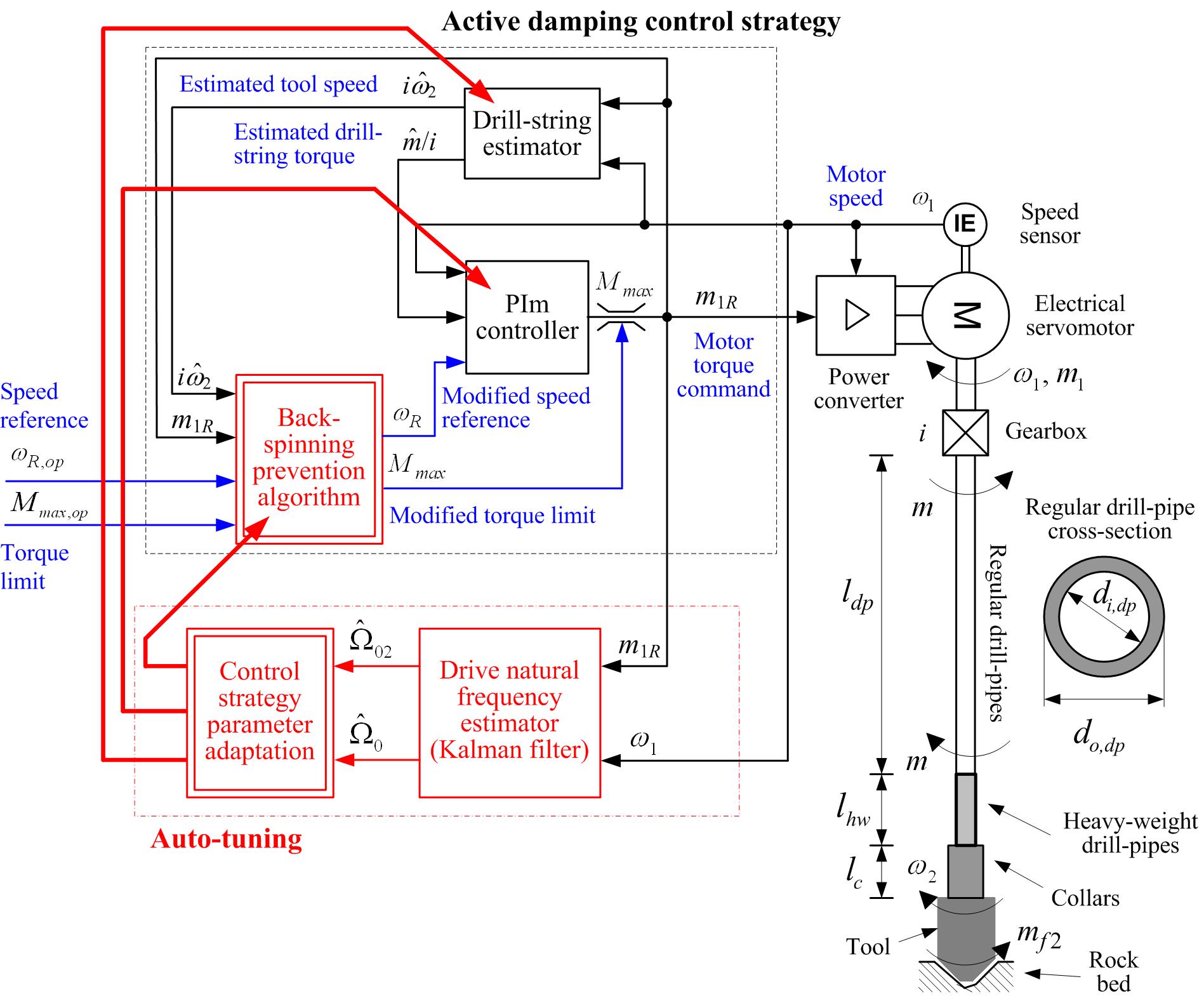
Considerable compliance of the lengthy oil-well drillstring combined with low tool inertia and stick-slip friction between the tool and the rock bed can cause notable undesired torsional vibrations of the drill-string electrical drive. In order to attenuate the torsional vibrations and, thus, improve both the quality and the productivity of the drilling process, an innovative active damping control strategy has been implemented. The control strategy block diagram is shown in Fig. 1. The core of the strategy includes a proportional-integral (PI) speed controller extended with estimator-based drill-string torque feedback loop (the so-called PIm controller). In order to avoid the potentially hazardous back-spinning of the compliant drill-string drive, which is caused by the limited braking power of the power converter and stick-slip tool friction, the control strategy also includes an appropriate back-spinning prevention algorithm. It continuously monitors the estimated tool speed and the motor torque, and safely unwinds the drillstring if the tool is critically stuck. In order to adapt the overall control strategy with respect to varying drill-string length and tool configuration, an auto-tuning procedure based on the on-line estimation of the drillstring parameters (i.e. drillstring drive natural frequencies) has also been developed. The natural frequency estimator is based on an adaptive Kalman filter.
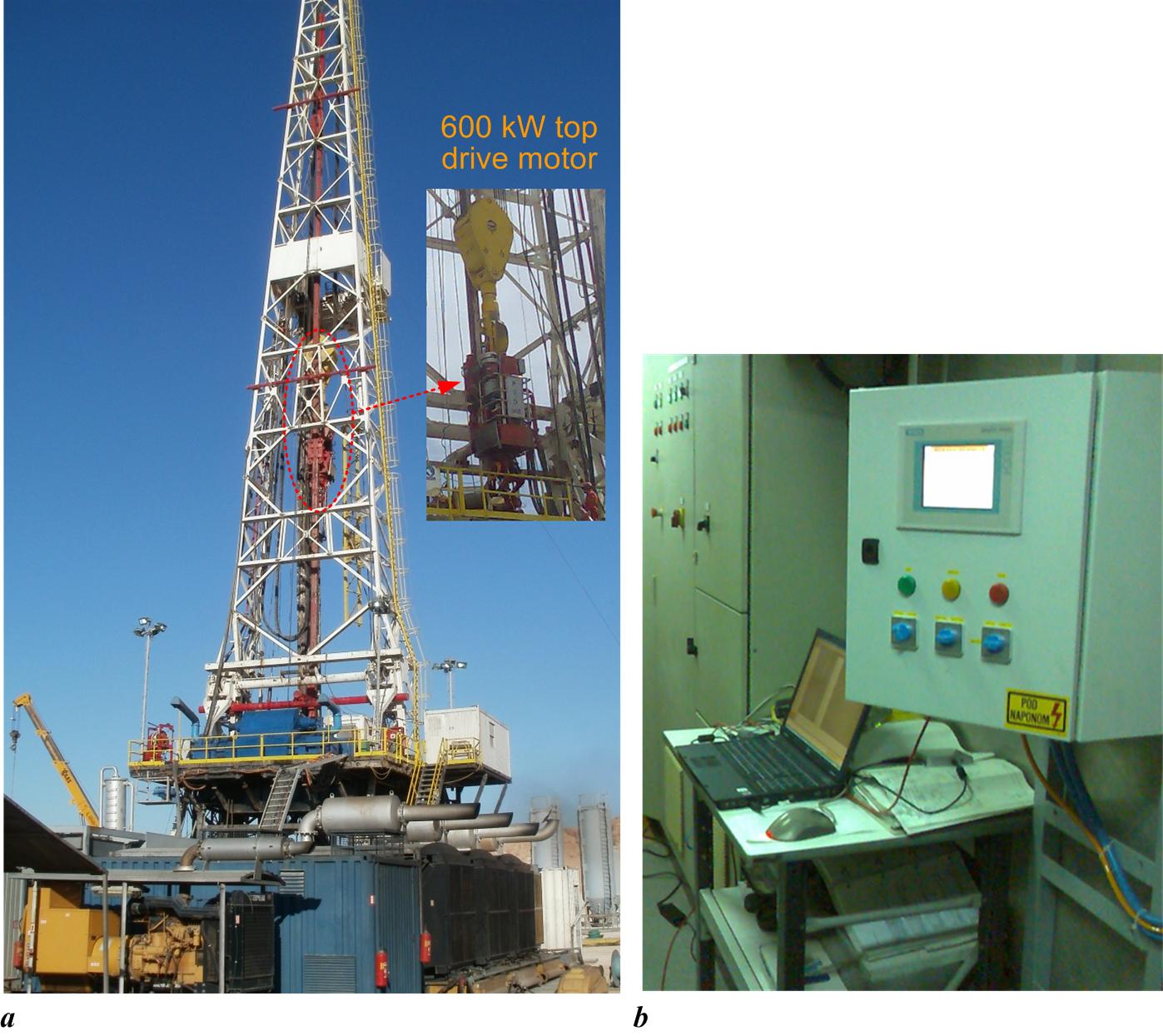
The overall adaptive control strategy has been implemented on a low-cost programmable logic controller (PLC) with floating-point arithmetic and it has been experimentally verified on a hardware-in-the-loop (HIL) setup under laboratory conditions in preparation for subsequent field tests. The control strategy field tests and ultimate commissioning have been carried out on the industry partners oil-drilling rig equipped with a 600 kW/3200 Nm top drive drilling motor (Fig. 2).
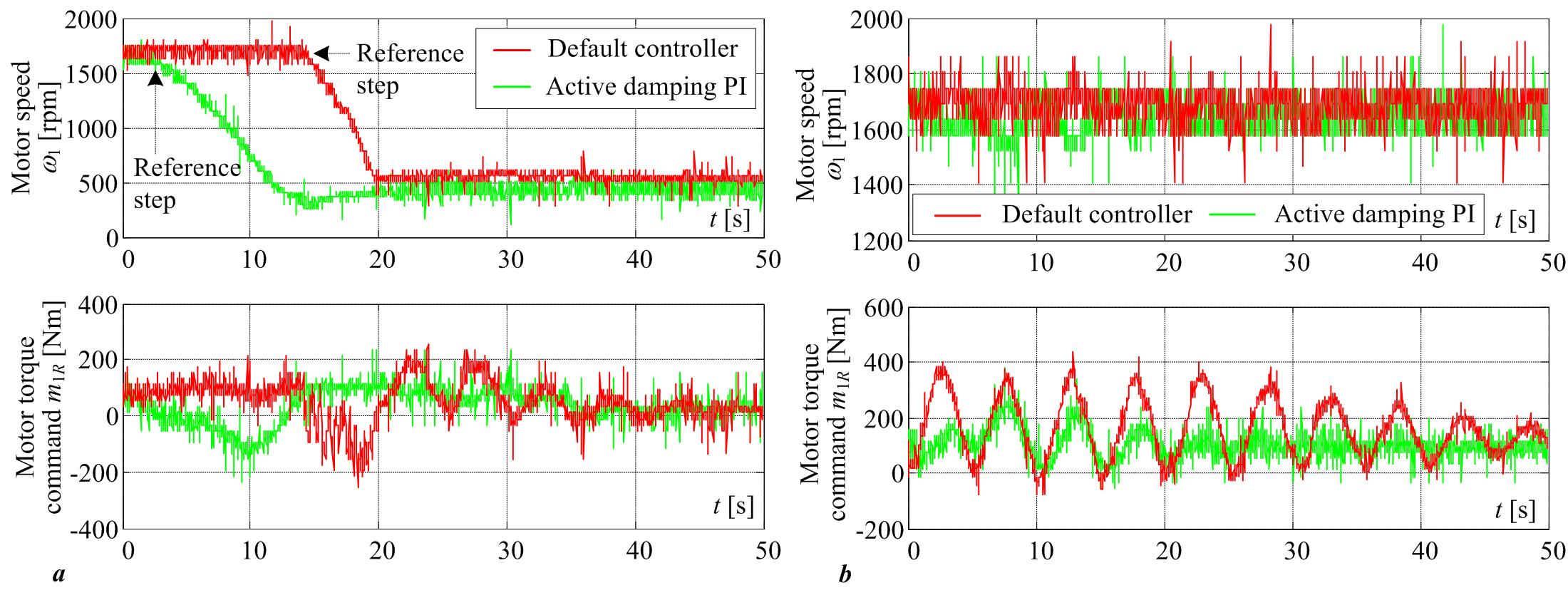
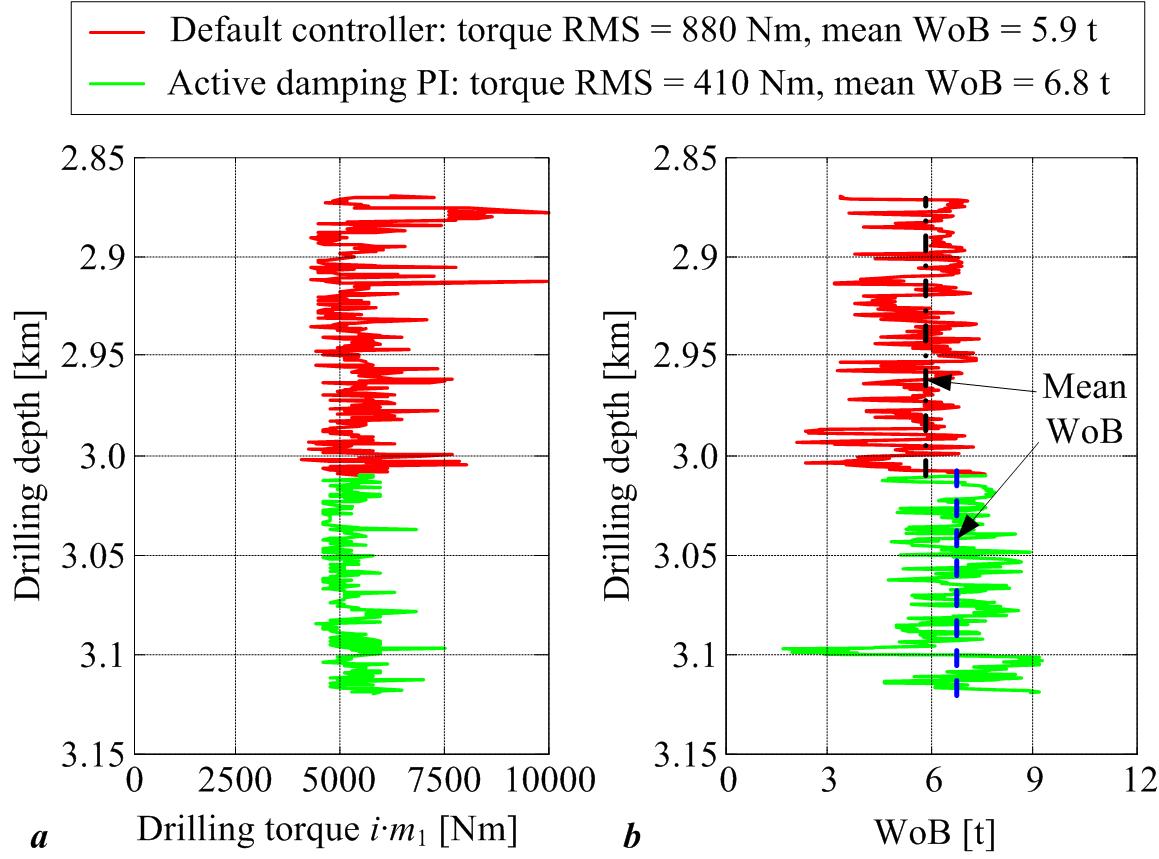
The active-damping PI controller has been compared with the default/commercial drill-string motor controller (a relatively fast PI controller). Fig. 3a shows the comparative test results in the case of sudden slowing down for the drill-string lifted from the bottom of the well. The active damping controller significantly improves the level of damping of torsional vibrations excited by the speed command change. The comparative results for the case of drilling with the stepwise weight-on-bit (WoB) change from 6 tons to 8 tons are shown in Fig. 3b. Again, the active damping controller is able to suppress the torsional vibrations much better compared to the default controller. Finally, the performance of the aforementioned controllers is compared based on the 48 hours monitoring of drilling torque and WoB by the on-site geological service, as shown in Fig. 4. The responses indicate that the application of active damping controller results in much smoother drill-string operation compared to the default controller (the RMS value of drilling torque perturbations is reduced by more than 50%), which is obtained for the approximately 15% increase of the average WoB, thereby also improving the drill-string rate of penetration.
The active damping control system is currently operational on several CROSCO’s on-shore drilling rigs.
Publications
-
Control Engineering Practice, Vol. 19, No. 8, pp. 836-850, 2011.