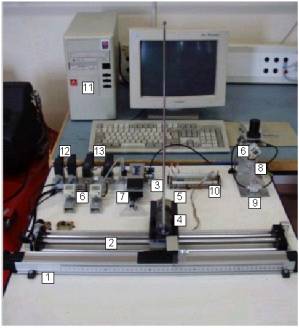
- Linear potentiometer
- Rodless cylinder
- Inverted pendulum
- Rotational servopotentiometer
- Electronic rerference card
- Pressure transducer
- Proportional valve
- Filter with pressure regulator
- Air supply valve
- Electronic interface
- PC computer
Research → Mechatronic systems → Inverted pendulum driven by pneumaticsThe inverted pendulum is a classic control problem and is very popular mechatronic application. However, what distinguishes described mechanism from common practice is its drive. This cart-pole system is driven by pneumatics. Many disciplines that form part of mechatronics, and their composite subject can be taught with the projects like the pneumatically driven inverted pendulum. It requires good knowledge in modeling, simulation, control and hardware implementation, yet it is affordable and relatively simple. Influences of design parameters variation (although just mass or pendulum length can be changed) on the behaviour of the system can be observed and compensated for by different control parameters or methods. Different possible sensors, actuators, outputs, and their influences on the system can be considered on this laboratory model. Below figures illustrate the photo of the experimental setup (see experimental system description) and the schematic diagram of the pneumatically actuated inverted pendulum. |
|
|
|
| Photography of inverted pendulum | Schematic diagram of control system |
|
|
|
| Experimental results of inverted pendulum using state feedback controller |