Active differential test rig
The test rig (see the photographs below) has been developed for the purpose of experimental characterization, model validation, and control of an Active Limited Slip Differential (ALSD). The ALSD has a common structure (see the principal scheme below), where one of the output shafts (in this case the left shaft) is connected to the rotating differential case by means of a controllable multi-plate wet clutch. A dc motor is used to engage the clutch using a gear reduction and ball-and-ramp mechanism that can produce the clutch pack axial force of up to 40 kN. A reset spring returns the mechanism into its initial position in the case of power supply off/failure, thus opening the differential. The test rig concept puts emphasis on the ALSD wet clutch experimental investigation. It provides a precise control of the clutch slip speed (up to 30 rpm) and the clutch actuator DC motor armature current, as well as a precise measurement of a high clutch torque (up to 2500 Nm).
A torque servo-motor (2) is used to drive the differential input shaft. The motor is taken from the experimental tire test vehicle, where it was implemented as an in-wheel motor. The motor develops a maximum torque of 880 Nm in the speed range from 0 to 120 rpm. The torque response settling time is 2 ms.
The electric motor (2) is connected to the differential (1) by means of the ALSD's standard half shaft (3) including the constant speed joints. The clutch-side differential output shaft is grounded by the torque measuring system, which consists of a 350 mm long lever (4) and a compression tensile force sensor (5). The force sensor is of strain gauge type with the accuracy class of 0.05% and the nominal force of 10 kN. The second output shaft is left to rotate freely.
The clutch actuator DC motor body (6) has been modified in order to facilitate mounting of a precise incremental encoder (7) directly to the motor shaft. The motor is supplied from a custom made 12V/25A MOSFET chopper (8), which also provides a high-bandwidth Hall sensor-based current feedback.
The control and monitoring system is built around an industrial Pentium III PC (9) with an integrated data acquisition card and another plug-in card that provides 1024-fold interpolation of the sinusoidal encoder signals.
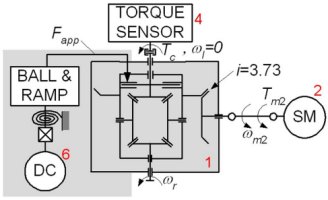
2 - Direct-drive electric servo motor
3 - Connecting shaft
4 - Torque measuring system lever
5 - Force sensor
6 - Clutch actuator DC motor
7 - Incremental encoder
8 - Chopper box (clutch motor chopper, signal amplifiers, power supply)
9 - Industrial Pentium III PC, frequency converter, and control subsystem



Fig. 1. Principal scheme and photographs of ALSD test rig.
Publications
-
SAE paper #2008-01-0302, 2008 SAE World Congress, Detroit, MI, 2008.