Dry dual clutch electromechanical actuator
A test rig of an electromechanical lever-based actuator of a dry dual clutch has been developed in order to support experimental work on characterization and modeling of the actuator dynamics. The test rig has been built around the original clutch bell housing (1) that accommodates the actuators (2) and their AC driving motors with spindle drives (3) equipped with precise incremental encoders. In order to separate the actuators from the complex/nonlinear dual clutch assembly dynamics, a selected actuator is loaded by a linear helical compression spring (4). An adjustment mechanism (5) is added in order to provide manual variation of the spring preload or the clearance between the engagement bearing and the loading spring, thus simulating different actuator loading conditions. The force of engagement bearing (6) is directly measured by a precise strain-gauge force sensor (7), while the lever motion is characterized by using two LVDT (Linear Variable Differential Transducer) displacement sensors. The first one is used to measure the lever output i.e. engagement bearing displacement (8), while the second one measures the displacement of the opposite side of lever (9) at the support point.
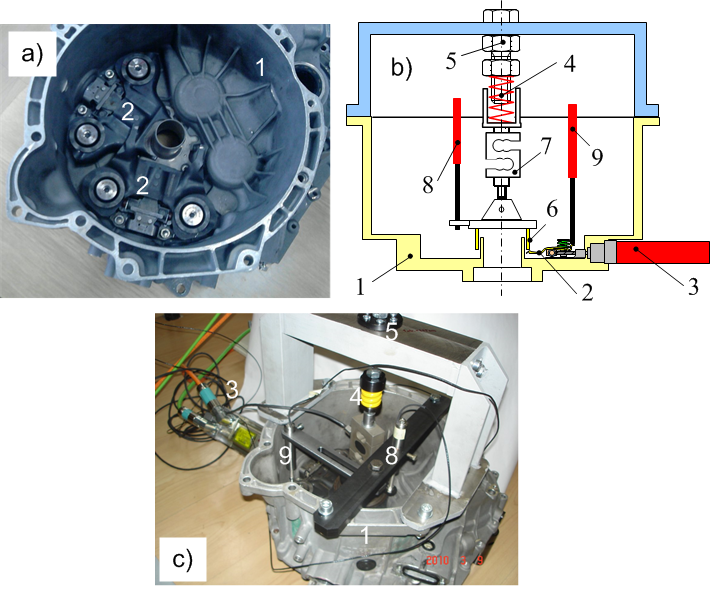
2. Actuators
3. Servomotor w/ spindle drive
4. Compression spring (load)
5. Adjustment mechanism
6. Engagement bearing
7. Force sensor
8. Engagement bearing displacement sensor
9. Displacement sensor of opposite side of lever
Fig. 1. Schematics and photographs of dry dual clutch electromechanical actuator experimental setup.
Publications
-
SAE paper #2012-01-0631, SAE International Journal of Passenger Cars - Mechanical Systems, Vol. 5, No. 2, pp. 865-875, 2012. -
Design of Test Rigs for a Dry Dual Clutch and its Electromechanical Actuator
SAE paper #2012-01-0807, SAE International Journal of Passenger Cars - Mechanical Systems, Vol. 5, No. 1, pp. 612-620, 2012.