Eksperimentalno električno vozilo
Eksperimentalno električno vozilo s motorom ugradenim u kotač (vidi fotografiju i prilog o našim istraživačkim aktivnostima u emisiji "Znanstvena petica" Hrvatske televizije) razvijeno je kao potpora istraživačkim aktivnostima na području modeliranja, estimacije i TCS/ABS regulacije dinamike trenja izmedu kotača i podloge. Vozilo sadrži tri standardna automobilska kotača, pri čemu je istraživani pogonjeni kotač montiran na prednjem kraju, dok su preostala dva (nepogonjena) kotača smještena na stražnoj osovini.
Mehanički sustav vozila može se podijeliti na nekoliko temeljnih sklopova: nosivu konstrukciju (1) s kabinom (7), sklop prednjeg kotača s ugradenim motorom (2, 3), sklop stražnjih kotača (4), redundantni kotač (5), sustav hladenja motora i sustav za prinudno zaustavljanje vozila. Pogonski motor izveden je na temelju ugradbenog sporohodnog sinkronog motora s permanentim magnetima (tzv. momentni motor (8)). Motor prenosi moment neposredno na kotač, pri čemu je maksimalni iznos momenta 880 Nm uz vrijeme odziva momenta od 2 milisekunde. Motor je opremljen preciznim inkrementalnim davačem koji generira 2 milijuna impulsa po okretaju nakon elektroničke interpolacije. Motor se koristi i kao glavna kočnica. Stražnji kotači opremljeni su bubanj kočnicama, koje se aktiviraju pomoću elektromagneta u slučaju ispada napajanja ili drugih nepredvidenih situacija. Za potrebe mjerenja brzine i akceleracije vozila, stražnji desni kotač sadrži inkrementalni davac istog tipa kao na pogonskom kotaču. U eksperimentima u kojima se stražnji kotači koče (npr. emulacija vožnje na uzbrdici), brzina i akceleracija vozila mogu se mjeriti redundantnim kotačem. Kada se zakrene za fiksni kut (npr. 20 stupnjeva), redundantni kotač opremljen senzorom lateralne sile može se koristiti i za mjerenje koeficijenta trenja izmedu gume i podloge.
Električni sustav vozila (vidi principnu shemu) može se podijeliti na električki pogonski sustav sa sustavom napajanja, te upravljački sustav. Dijelovi pogonskog sustava sa sustavom napajanja su: servomotor (5) s frekvencijskim pretvaračem (8), crpka za rashladni fluid (9), elektromagnet kočnice (19) i kutija napajanja (22). Jezgru upravljačkog sustava čini industrijsko PC računalo s Pentium III procesorom (14) i odgovarajućim utičnim akvizicijskim karticama na koje su spojeni inkrementalni davači položaja (6, 7), senzori temperature (11-14), programabilni logički kontroler (PLC) (25) i upravljačka konzola (26). Operater zadaje odgovarajuće naredbe vozilu putem upravljačke konzole. Naredbe i povratne informacije s vozila prenose se serijskom komunikacijom pomoću informacijskih parica ugradenih u energetski kabel za napajanje vozila i obraduju se u PLC-u. Upravljačko računalo je također opremljeno WLAN karticom za bežičnu komunikaciju izmedu PC računala na vozilu i prijenosnog računala operatera (27), koje se koristi za prebacivanje upravljačkog programa i prijenos snimljenih podataka.

Sl. 1. Fotografija eksperimentalnog električnog vozila sa servomotorom ugradenim u kotač.
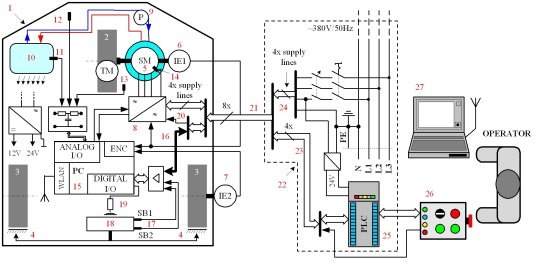
Sl. 2. Principna shema električnog sustava vozila.
Video 1. Kratki video zapis TV reportaže.
Publications
-
Doktorski rad, Fakultet strojarstva i brodogradnje, Sveučilište u Zagrebu, 2010. -
Experimental Identification and Modeling of Dynamic Tire Friction Potential on Slippery Surfaces
XIX IAVSD Symposium, Berkeley, CA, 2007. -
Experimental Identification of Dynamic Tire Friction Potential on Ice Surfaces
XIX IAVSD Symposium, Milan, Italy, Aug/Sep 2005; Aug/Sep 2005; Vehicle System Dynamics, Vol. 44, Supplement 1, pp. 93-103, 2006. -
An Experimental Electrical Vehicle with In-wheel Motor
CD Proc. of 13th Int. Conference on Electrical Drives and Power Electronics (EDPE 2005), Dubrovnik, Croatia, 2005.