Postav za generiranje vertikalnih vibracija automobilskog sjedala
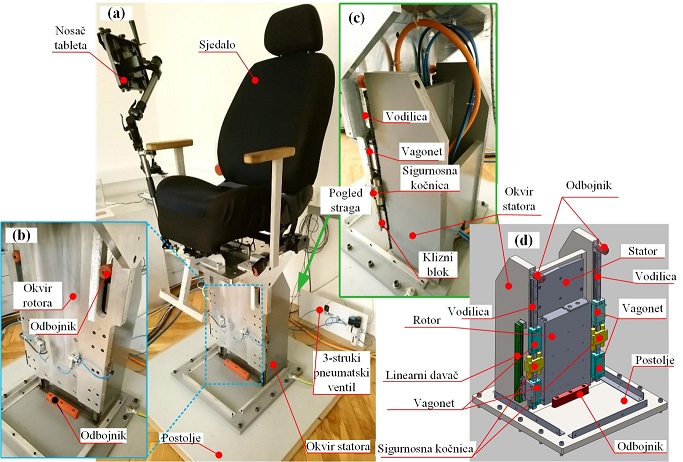
Razvojem suvremenih autonomnih vozila, vozač postaje putnik. Osiguravanjem visoke razine udobnosti vožnje primjenom aktivnog ovjesa može se značajno poboljšati sposobnost vozača za obavljanje različitih zadataka poput čitanja, crtanja i slanja tekstualnih poruka. Kako bi se mogla provesti laboratorijska ispitivanja utjecaja ugradnje raznih tipova aktivnih ovjesa na udobnost vožnje, projektiran je specijalizirani eksperimentalni postav za generiranje vertikalnih vibracija automobilskog sjedala. Računalom upravljani ispitni postav zasnovan je na primjeni linearnog električnog servomotora.
Radni parametri postava dobiveni su na temelju rezultata računalnog optimiranja upravljačkih varijabli aktivnog ovjesa automobila, te uključuju maksimalne očekivane vrijednosti akceleracije (±1 g), brzine (±1 m/s) i pomaka (±100 mm) autosjedala, te gornju graničnu frekvenciju slijednog sustava akceleracije (najmanje 30 Hz, a po mogućnosti do 50 Hz). Razmatrana su tri moguća koncepta postava zasnovana na primjeni hidrauličkog cilindra, linearnog električnog servomotora te rotacijskog elektromotora s planarnim navojnim vretenom. U konačnici je odabran i realiziran dizajn sa linearnim servomotorom.
Odabrani linearni servomotor isporučen od strane tvrtke HS-TEC razvija maksimalnu silu od 6900 N pri brzinama do 0.6 m/s, a pri brzini 2 m/s maksimalna sila motora iznosi 2610 N. Ukupna masa pokretnog dijela postava zajedno sa vozačem može dosegnuti 200 kg. Stoga maksimalna akceleracija pri uzlaznom gibanju postava iznosi 2.5 g za brzine do 0.6 m/s, odnosno 1.8 g za brzine do 1 m/s.
Za potrebe mjerenja vertikalne akceleracije, postav je opremljen sa dva precizna jednoosna DC akcelerometra visoke osjetljivosti i niskog iznosa mjernog šuma, te mjernih opsega ±2g i ±10g. Za mjerenje brzine i pomaka autosjedala koristi se apsolutni linearni davač mjernog opsega 220 mm i deklarirane točnosti ± 5 µm.
Podređeni regulacijski sustav eksperimentalnog postava zadaje referentnu vrijednost sile servomotora za regulator sile/struje integriran u frekvencijskom pretvaraču nazivne snage 12 kW. Referentna vrijednost sile generirana je od strane nadređenog regulacijskog sustava, koji uključuje regulatore akceleracije, brzine i položaja autosjedala, za koje su referentne vrijednosti određene van realnog vremena temeljem simulacije dinamike vozila. Upravljački sustav postava implementiran je na National Instruments CompactRIO upravljačko-akvizicijskoj platformi s FPGA-sklopovljem te programiran u LABview programskom okruženju.
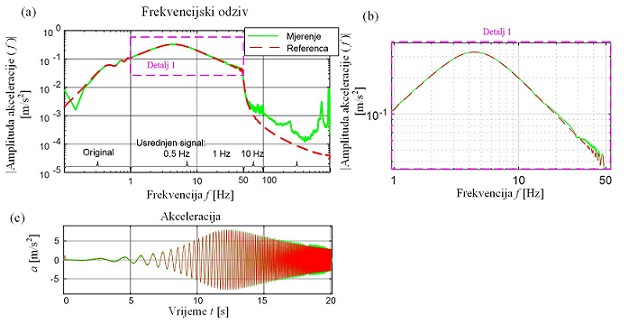
Jezgru eksperimentalnog postava čini regulator akceleracije proširen s unaprijednim djelovanjem, koji omogućuje izvrsnu kvalitetu slijeđenja do frekvencije od 30 Hz, te vrlo dobro slijeđenje do 50Hz. Regulator uključuje i kompenzaciju posmaka mjerenja akcelerometara, kako bi se izbjegao drift brzine i pozicije autosjedala. Posebna pažnja posvećena je kompenzaciji oscilacija sile motora zbog utjecaja permanentnih magneta (engl. cogging force compensation).
Publications
-
ASME Journal of Autonomous Vehicles and Systems, Vol. 1, No. 1, pp. 011004/1-21, 2021. -
Design of a Linear Motor-Based Shaker Rig for Testing Driver's Perceived Ride Comfort
Mechatronics, Vol. 75, pp. 102521/1-18, 2021. -
A Shaker Rig-Based Testing of Perceived Ride Comfort for Various Configurations of Active Suspensions
ASME Journal of Dynamic Systems, Measurement, and Control, Vol. 142, No. 11, pp. 114504/1-7, 2020.