Postav E-spojke
E-spojka je tip djelomično automatizirane suhe spojke korišćene unutar manualne transmisije (ili potpuno automatizirane spojke primijenjene u sklopu elektrificirane transmisije). Senzor položaja smješten na papučici kvačila predaje signal namjere vozača upravljačkom sustavu, koji potom upravlja spojkom putem aktuacijskog sustava. Tako vozač može zadržati postojeće navike u vožnji, dok upravljački sustav omogućava uštedu goriva i kompenzira moguću lošu reakciju vozača (npr. sprečava gašenje motora). Razvoj preciznog sustava upravljanja E-spojkom zahtijeva eksperimentalnu karakterizaciju i provjeru pomoću ciljano razvijenog ispitnog postava.
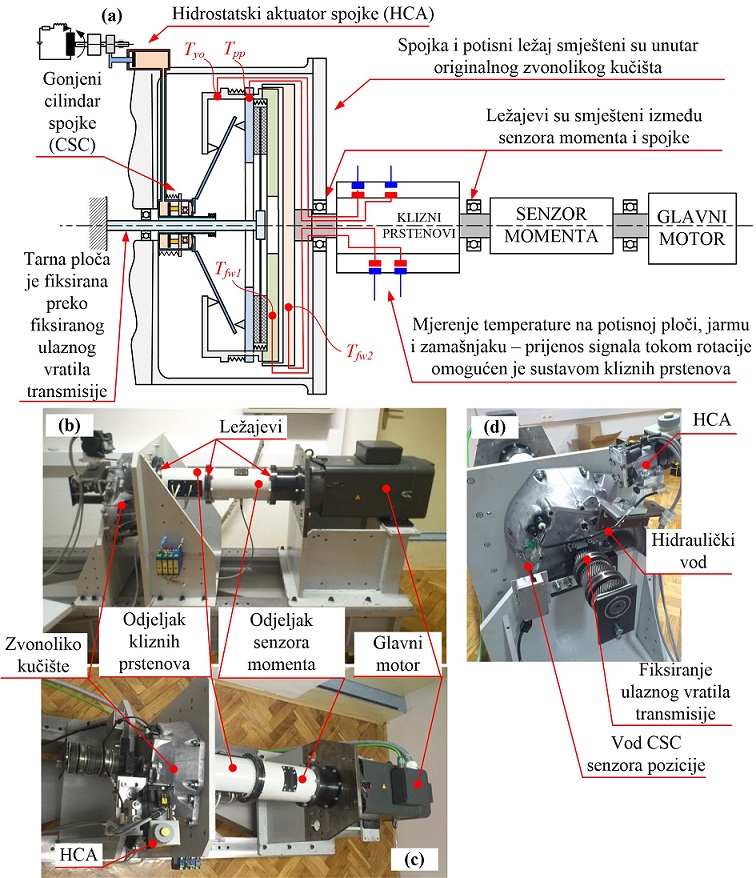
Razvijeni ispitni postav pokretan je sinhronim servomotorom s permanentnim magnetima, s nazivnom snagom, brzinom i okretnim momentom od redom 35 kW, 3000 1/min i 110 Nm. Motor može razvijati okretni moment od 230 Nm kroz 1 min i 270 Nm kroz 3 s. Brzina i položaj mjere se pomoću preciznog davača ugrađenog u servomotor. Snaga motora prenosi se na dvostruki zamašnjak spojke preko telemetrijskog senzora zakretnog momenta (model T22 tvrtke HBM; mjerni opseg od 500 Nm). Da bi se dobio precizan signal momenta spojke, signal senzora zakretnog momenta kompenzira se s obzirom na utjecaj momenta ubrzanja i trenje u ležajevima. Tarna ploča spojke zakočena je preko fiksiranog ulaznog vratila transmisije. Aktuator spojke hidrostatskog tipa i potisni ležaj ugrađeni su na isti način kao i na stvarnoj transmisiji. Struktura ispitnog postava omogućava buduće nadogradnje prema eksperimentalnom postavu cjelokupne transmisije s E-spojkom, uključujući mogućnost ugradnje dinamometarskog sustava.
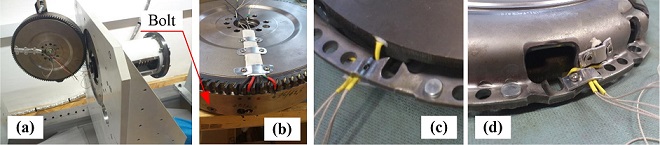
Spojka je opremljena s pet senzora temperature. Tri su ugrađena u provrte izrađene u primarnom i sekundarnom disku zamašnjaka te potisnoj ploči (PT100 sonde Honeywell, model HEL707-T-0-12-00). Svi su senzori pozicionirani na srednjem polumjeru dane komponente i na udaljenosti od 4 mm od dodirne ravnine trenja. Četvrti temperaturni osjetnik postavljen je u utor urezan na površini jarma, dok je peti postavljen na gornju površinu zvonolikog kućišta na minimalnoj udaljenosti od ravnine trenja. Signali iz temperaturnih senzora instaliranih na rotirajućim komponentama prenose se u sustav za prikupljanje podataka putem kliznokolutnog sustava (SK5 model tvrtke HBM). Pritom su izrađena tri aksijalna provrta kroz vanjski obruč primarnog diska radi provođenja žica osjetnika temperature, a primarni i sekundarni disk međusobno su spojeni pomoću šest radijalno postavljenih vijaka. Time je onemogućena funkcija dvomasenog zamašnjaka povezana s prigušivanjem torzijskih vibracija, no ona ionako nije relevantna za dani postav zbog primjene električnog servomotora kao pogonskog stroja. Ostale karakteristike dvomasenog zamašnjaka, uključujući njegovu inerciju, toplinske mase i prijenos topline, ostaju nepromijenjene.
Podsustav za mjerenje i upravljanje ispitnim postavom izgrađen je na bazi industrijskog Pentium III računala, a upravljački softver napisan je u programskom jeziku C za DOS operativni sustav. Akvizicijski podaci uključuju gore navedena mjerenja, te očitanja senzora hidrostatskog aktuatora, poput pozicija primarnog i sekundarnog cilindra te tlaka fluida.
Publications
-
Transactions of FAMENA, Vol. 48, No. 3, pp. 21-35, 2024. -
Design of a Test Rig in Support of E-clutch Dynamics Characterisation, Modelling, and Control
International Journal of Powertrains, Vol. 9, No. 3, pp. 221–239, 2020. -
E-clutch Torque Control Including Compensation of Thermal Expansion Effects
IEEE Transactions on Vehicular Technology, Vol. 69, No. 1, pp. 246–257, 2020. -
Design of a Test Rig in Support of E-clutch Dynamics Characterisation, Modelling, and Control
Powertrain Modelling and Control Conference (PMC 2018), Loughborough, UK, 2018.