Upravljanje uljnom spojkom aktivnog diferencijala
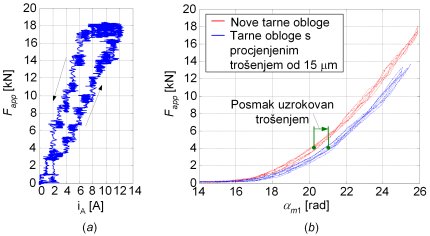
Moment lamelne spojke proporcionalan je umnošku normalne sile spojke (primijenjena sila Fapp) i koeficijenta trenja (μ). Koeficijenta trenja ovisi o brzini klizanja ωs, normalnoj sili Fapp i temperaturi tarnih obloga ϑ. Budući da ne postoji ekonomičan način mjerenja momenta spojke, upravljanje momentom uobičajeno se zasniva na upravljanju primijenjenom silom u otvorenom krugu, pri cemu se sustav upravljanja može adaptirati s obzirom na procijenjenu temperaturu, brzinu klizanja i eventualno na stupanj trošenja tarnih obloga. Iako upravljanje u otvorenom krugu može biti učinkovito rješenje kod primjene izravnih aktuatora spojke (npr. hidraulički aktuatori), ono može uzrokovati značajne statičke i dinamičke netočnosti kao posljedicu histereznog ponašanja trenja karakteristicnog za neizravne aktuatore (npr. rotacijski motor s prijenosnim mehanizmom tipa kuglice na kosini /engl. ball-ramp mechanism/; Sl. 1a).
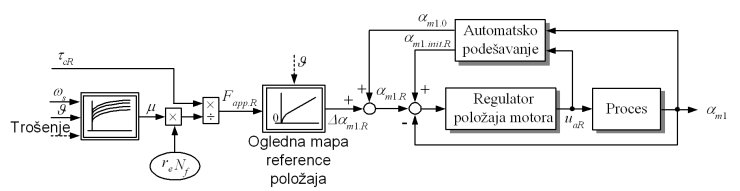
Kao alternativa upravljanju spojkom u otvorenom krugu predložen je neizravan sustav regulacije uljne spojke aktivnog diferencijala pogonjene isosmjernim motorom. Regulacijski sustav prikazan na slici 2 temelji se na statičkoj karakteristici primijenjene sile u funkciji kuta zakreta (položaja) istosmjernog motora Fapp( αm1), koja ne sadrži histerezu (Sl. 1b). Uz poznavanje koeficijenta trenja spojke μ , efektivnog polumjera re i broja aktivnih tarnih obloga Nf, referenca momenta spojke τcR prevodi se u referencu primijenjene sile spojke FappR. Referenca primijenjene sile transformira se zatim u referencu položaja motora uz primjenu obrnute ogledne tablice sa slike 1b. Položaj motora regulira se pomoću standardne kaskadne strukture regulacije ili PID regulatora slicnog onom primijenjenom kod regulacije elektronicke zaklopke. Koeficijent trenja μ proračunava se iz prethodno pripremljene mape u funkciji mjerene brzine klizanja ωs i procijenjene temperature ϑ (vidjeti prilog Modeliranje uljne spojke aktivnog diferencijala). Utjecaj trošenja tarnih obloga kompenzira se primjenom automatskog podešavanja posmaka referentne karakteristike položaja (vidi Sl. 1b i Sl. 2) temeljem procjene položaja za koji referenca napon motora uaR počinje naglo rasti (položaj "dodira" tarnih obloga). Automatsko podešavanje može se primjerice primijeniti svaki put kada se motor vozila isključi. Konačno, ogledna tablica reference položaja može se adaptirati s obzirom na mjerenu temperaturu fluida.
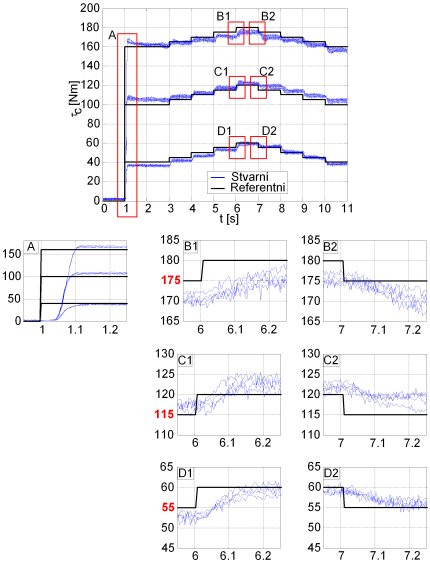
Cjelokupni sustav regulacije spojke (Sl. 2) implementiran je i eksperimentalno provjeren na eksperimentalnom postavu uljne spojke. Slika 3 prikazuje eksperimentalne odzive momenta spojke za skokove reference momenta spojke velikog iznosa (40, 100, and 160 Nm) i malog iznosa (5 Nm), te razne vrijednosti pocetnog momenta (40, 100, and 160 Nm). Pritom je potrebno napomenuti da navedene vrijednosti momenta odgovaraju 10 puta većim iznosima za puni paket lamela spojke aktivnog diferencijala. Eksperimentalni rezultati na slici 3 ukazuju na brz odziv momenta spojke neovisno o radnim parametrima (vrijeme smirivanja odziva je oko 100 ms), dobru stacionarnu točnost odziva (relativna pogreška manja je od 5%, osim za vrlo male reference momenta) i dobru ponovljivost odziva. Daljnje bi istraživanje trebalo uključiti analizu i moguću kompenzaciju utjecaja mjerene temperature fluida, proizvodnih odstupanja i uvjeta okoline. Također, moguće je uvesti pretkompenzator i eksplicitni kompenzator trenja kako bi se ubrzao odziv u režimu malih signala.