Control of Active Differential Wet Clutch
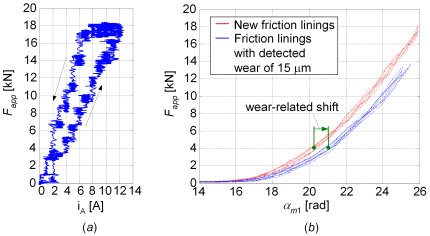
The plate clutch torque is proportional to the product of normal force to the clutch pack (applied force, Fapp) and clutch friction coefficient (μ). The friction coefficient itself depends on the slip speed ωs, the normal force Fapp, and the friction interface temperature ϑ. Since there are no economically feasible means of measuring the clutch torque, the torque control is typically based on open-loop applied force control, which may be adapted with respect to estimated temperature, slip speed, and optionally friction lining wear. While the open-loop control can be an effective solution when direct clutch actuators are applied (e.g. hydraulic actuator), it can suffer from significant steady-state and transient inaccuracies caused by the friction hysteresis of indirect actuators (e.g. rotational motor with ball-ramp mechanism; Fig. 1a).
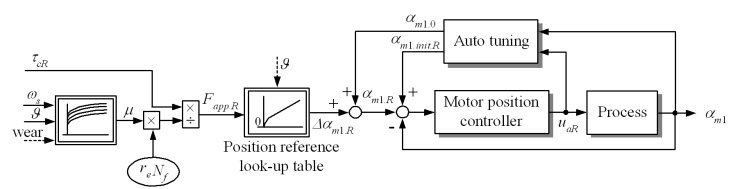
As an alternative to open-loop clutch control, an indirect closed-loop strategy of dc motor-actuated active differential wet clutch control has been proposed. The closed-loop control strategy shown in Fig. 2 is based on a hysteresis-free clutch applied force vs. dc motor position static curve Fapp( αm1) shown in Fig. 1b. The clutch torque reference τcR is transformed to the clutch applied force reference FappR based on the knowledge of clutch friction coefficient μ, effective radius re, and number of active friction surfaces Nf. The applied force reference is then transformed to the motor position reference using the inverse of lookup table in Fig. 1b. The motor position is controlled by a standard cascade controller or a PID controller similar to the one used in electronic throttle control. The friction coefficient μ is scheduled with respect to measured slip speed ωs and estimated temperature ϑ (see Active differential clutch modeling contribution for details). An auto-tuning procedure is used to compensate for the clutch wear by shifting the position reference curve (see Figs. 1b and 2) based on estimation of the motor position for which the motor armature voltage reference uaR tends to suddenly grow (the "touching" position). For instance, the auto-tuning can be used each time when the engine is turned off. Finally, the position reference look-up table may be scheduled with respect to measured fluid temperature.
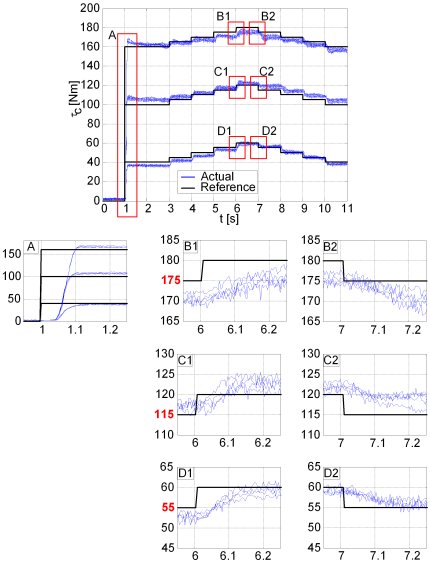
The overall clutch control strategy (Fig. 2) has been implemented and experimentally verified on the wet clutch experimental setup. Fig. 3 shows the experimental clutch torque responses for large torque request steps (40, 100, and 160 Nm) and a small torque request step (5 Nm) at different levels of initial torques (40, 100, and 160 Nm). Note that these torque values correspond to 10 times higher value on the full active differential clutch pack. The experimental results in Fig. 3 indicate a fast clutch torque response regardless of operating conditions (settling time is around 100 ms), good steady-state accuracy (the relative error is less than 5% except for very small torque requests), and good repeatability. Future work should include analysis and possible compensation of influences of the measured fluid temperature, production deviations, and environmental conditions. Also, feedforward position controller and an explicit friction compensator may be used for faster response in the small signal operating mode.