Procjena brzine skretanja vozila
Informacija o brzini skretanja vozila ključna je za realizaciju sustava upravljanja lateralnom dinamikom vozila. Brzina skretanja uobičajeno se mjeri pomoću žiroskopa postavljenog u težište vozila. U svrhu nadzora ispravnosti žiroskopa ili snižavanja cijene mjernog sustava može se realizirati i sustav procjene brzine skretanja na temelju ostalih senzora dinamike vozila i odgovarajućeg modela vozila. Tako je brzinu skretanja moguće procijeniti na temelju mjerenja dvaju linearnih akcelerometara ili mjerenja brzina nepogonjenih kotača.
Za implementaciju kinematskog estimatora brzine skretanja vozila temeljenog na mjerenju dvaju akcelerometara, predložena je dijagonalna konfiguracija senzora (Sl. 1) kao dobar kompromis izmedu lateralne i longitudinalne konfiguracije (longitudinalna konfiguracija ne daje stacionarnu informaciju o brzini skretanja i osjetljiva je na drift procijenjene veličine, dok je lateralna konfiguracija netočna pri malim brzinama skretanja i ne daje informaciju o predznaku brzine skretanja). Koristeći kinematske jednadžbe za mjerenja dijagonalno smještenih akcelerometara ayf i ayr dobiva se sljedeća jednadžba:

gdje je χ mjerni član akceleracije. Jednadžba estimatora dobiva se iz gornjeg izraza kada se zanemare komponente povezane s brzinama valjanja ωx i poniranja ωy:

Ovaj estimator omogućuje istovremenu procjenu brzine i akceleracije skretanja. Uz pretpostavku precizne orijentacije akcelerometara, glavni izvor pogrešaka procjene je i dalje drift koji se javlja kao posljedica posmaka akcelerometara i integracije potrebne kako bi se dobila procijenjena vrijednost  .
.

Razmatran je, također, estimator brzine skretanja temeljen na mjerenju brzina vrtnje nepogonjenih kotača za vozila sa prednjim pogonom. Naime, brzina skretanja može se procijeniti iz signala brzine vrtnje nepogonjenih kotača (Sl. 1) prema sljedećoj kinematskoj jednadžbi: 
u kojoj je umjesto nepoznatih efektivnih polumjera stražnjih autoguma rrr i rrl uvršten nominalni polumjer rn.
Ovaj se estimator ne može koristiti tijekom kočenja i prilikom vožnje po izrazito neravnom kolniku (npr. izbočine i udarne rupe). Naime, longitudinalna klizanja kotača uslijed kočenja i neravninama izazvani vršci signala brzine vrtnje kotača uzrokuju značajne pogreške estimacije. Na točnost procjene, također, utječu promjene efektivnih polumjera stražnjih guma, rrr i rrl, u odnosu na nominalnu vrijednost rn, koje su uzrokovane promjenom tlaka zraka gume, trošenjem gume, ili promjenom normalne sile kotača uslijed valjanja vozila ili bočnog nagiba ceste. Međutim, za razliku od pogrešaka uzrokovanih kočenjem i neravninama na kolniku, ove pogreške je moguće znatno smanjiti primjenom jednostavnih kompenzacijskih algoritama zasnovanih na pojednostavljenom modelu vozila.
Estimator zasnovan na konceptu stapanja (fuzije) senzora kombinira mjerenja akcelerometara i senzora brzine vrtnje nepogonjenih kotača, s ciljem prevladavanja ograničenja u pogledu točnosti pojedinačnih pristupa procjene. Stapanje senzora realizirano je primjenom adaptivnog proširenog Kalmanovog filtra (engl. Extended Kalman Filter, EKF) prema prikazu na slici 2. Na ulaze Kalmanovog filtra dovedeni su mjerni signal χm dobiven iz mjerenja dvaju akcelerometara, te procijenjena brzina skretanja  temeljena na mjerenju brzina vrtnje nepogonjenih kotača. Signal
temeljena na mjerenju brzina vrtnje nepogonjenih kotača. Signal  dobiva se iz grubo procijenjenog signala
dobiva se iz grubo procijenjenog signala  (vidi gore) nakon kompenzacije pogrešaka procjene uzrokovanih promjenama efektivnog polumjera gume. Ovaj se signal dovodi na ulaz RBD bloka, koji na temelju praćenja varijance ulaznog signala detektira poremećaje uslijed neravnog kolnika. Na ulaz Kalmanovog filtra se dovodi vremenski zakašnjela, filtrirana kopija signala predestimatora
(vidi gore) nakon kompenzacije pogrešaka procjene uzrokovanih promjenama efektivnog polumjera gume. Ovaj se signal dovodi na ulaz RBD bloka, koji na temelju praćenja varijance ulaznog signala detektira poremećaje uslijed neravnog kolnika. Na ulaz Kalmanovog filtra se dovodi vremenski zakašnjela, filtrirana kopija signala predestimatora  , kako bi se osigurala pravovremena adaptacija Kalmanovog filtra.
, kako bi se osigurala pravovremena adaptacija Kalmanovog filtra.
Brzina i akceleracija skretanja vozila, te posmak mjerenja akcelerometara ( ,
,  , and
, and  ) predstavljaju varijable stanja modela procesa korištenog za sintezu Kalmanovog filtra. Adaptacija Kalmanovog filtra temelji se na podešavanju matrice kovarijanci u ovisnosti o stupnju povjerenja u pojedinačne estimatore. Kriteriji adaptacije vezani su uz logička stanja kočenja i detekcije neravnina, te amplitude procijenjenih vrijednosti brzine i akceleracije skretanja. Pristup s parom akcelerometara primjenjuje se prvenstveno za procjenu brzine skretanja u dinamičkim uvjetima, za vrijeme kočenja i u slučaju detekcije neravnog kolnika, dok se pristup zasnovan na mjerenju brzina nepogonjenih kotača koristi u kvazistacionarnim stanjima kako bi se procijenio kombinirani posmak akcelerometara
) predstavljaju varijable stanja modela procesa korištenog za sintezu Kalmanovog filtra. Adaptacija Kalmanovog filtra temelji se na podešavanju matrice kovarijanci u ovisnosti o stupnju povjerenja u pojedinačne estimatore. Kriteriji adaptacije vezani su uz logička stanja kočenja i detekcije neravnina, te amplitude procijenjenih vrijednosti brzine i akceleracije skretanja. Pristup s parom akcelerometara primjenjuje se prvenstveno za procjenu brzine skretanja u dinamičkim uvjetima, za vrijeme kočenja i u slučaju detekcije neravnog kolnika, dok se pristup zasnovan na mjerenju brzina nepogonjenih kotača koristi u kvazistacionarnim stanjima kako bi se procijenio kombinirani posmak akcelerometara  i time otklonile pogreške drifta procijenjenog signala.
i time otklonile pogreške drifta procijenjenog signala.

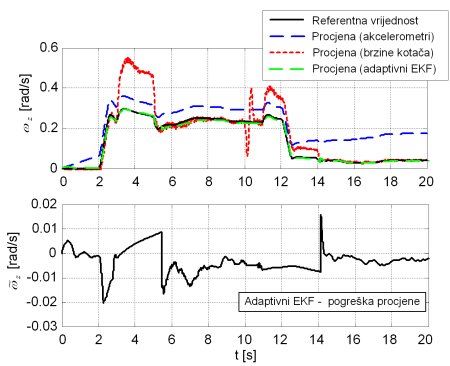
Predloženi adaptivni Kalmanov filtar provjeren je simulacijskom usporedbom procijenjenog signala brzine skretanja s referentnim signalom dobivenim iz modela dinamike vozila s 10 stupnjeva slobode gibanja (Sl. 3). U razmatranom manevru skretanja, kočni moment iznosa 300 Nm po kotaču primijenjen je u vremenskim intervalima 3-5 s i 11-14 s, dok je u t = 10 s simuliran poremećaj uslijed oštre izbočine na kolniku. Pristup zasnovan na mjerenju brzina nepogonjenih kotača rezultira velikom pogreškom procjene za vrijeme kočenja ili neravne podloge, dok je pristup temeljen na akcelerometrima karakteriziran pojavom drifta koji je posebno izražen kod malih brzina skretanja (Sl. 3). Korištenjem adaptivnog Kalmanovog filtra značajno se reduciraju svi dominantni izvori pogrešaka procjene. Preostala pogreška procjene potisnuta je ispod granice od 10% referentne vrijednosti.
Podrobniji prikaz analize pojedinačnih kinematskih estimatora i razvoja kombiniranog EKF estimatora dani su u dolje navedenim publikacijama.
Publikacije
-
21st International Symposium on Dynamics of Vehicles on Roads and Tracks (IAVSD, 2009. -
Adaptive Kalman Filter-based Yaw Rate Estimation Using Accelerometers and Wheel Speed Sensors
ASME Dynamic Systems and Control Conference (2009 DSCC), Hollywood, CA, 2009. -
Analysis of Accelerometer-based Kinematic Yaw Rate Estimators
Proc. of 9th International Symposium on Advanced Vehicle Control (2008 AVEC), Kobe, Japan, 2008.