Modeliranje uljnom spojkom aktivnog diferencijala
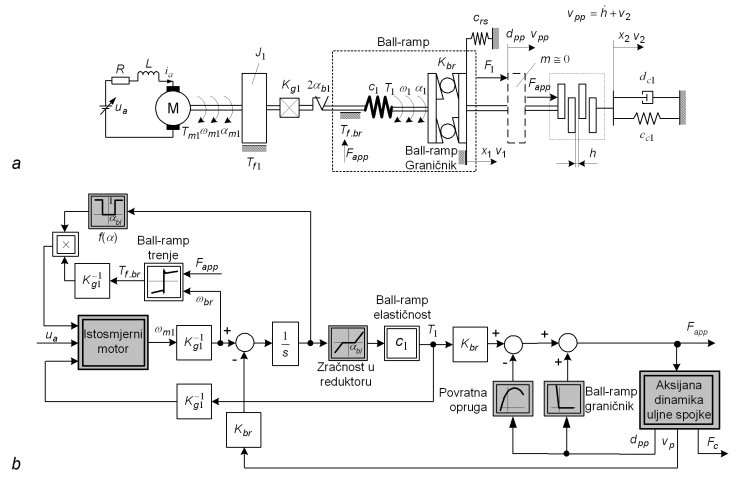
Modeliranje uljne spojke aktivnog diferencijala predstavlja ključan korak ka razvoju modela diferencijala i sustava upravljanja spojkom tj. diferencijalom. Slika 1a prikazuje strukturnu shemu spojke za razmatrani poluaktivni diferencijal. Višelamelna uljna spojka pogonjena je istosmjernim motorom s reduktorom i prijenosnim mehanizmom tipa kuglice na kosini (engl. ball-ramp mechanism). Za otvaranje spojke u slučaju prekida napajanja koristi se povratna opruga, pri čemu se gibanje prijenosnog mehanizma unatrag ograničava mehaničkim graničnikom.
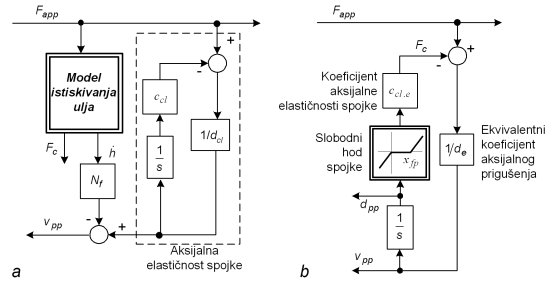
Slika 1b prikazuje blokovski dijagram modela podsustava za generiranje aksijalne sile spojke. Model dinamike istosmjernog motora je standardnog oblika proširenog s opisima trenja u motoru s reduktorom i termodinamičkih učinaka. Zračnost u reduktoru modelira se elementom zone neosjetljivosti (tzv. mrtva zona). Model prijenosnog mehanizma sadrži nelinearnu krivulju elastičnosti i Dahlov model trenja s varijabilnom aksijalnom silom spojke. Model trenja također opisuje trenje u aksijalnom i radijalnom ležaju prijenosnog mehanizma. Povratna opruga opisuje se nelinearnom krivuljom elstičnosti, dok model mehaničkog graničnika ima "beskonačnu" krutost za gibanje unatrag kod krajnjeg položaja i nultu krutost za gibanje unaprijed. Fizikalni model aksijalne dinamike spojke opisuje dinamiku istiskivanja fluida i aksijalne elastičnosti (Sl. 2a). Budući da je sila otpora istiskivanju fluida puno manja od visoke primijenjene sile (iznosi do 40 kN), model aksijalne dinamike spojke pojednostavljeno se opisuje elementom slobodnog hoda (zračnosti) i ekvivalentim aksijalnim koeficijentom prigušenja (Sl. 2b). Parametri modela na slici 1 određeni su eksperimentalnom identifikacijom u više koraka.
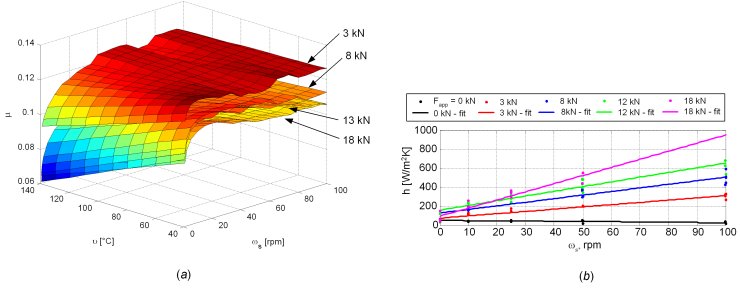
Aksijalna sila spojke Fapp (izlazna varijable modela na Sl. 1) vodi se u model trenja spojke zajedno s brzinom klizanja ωs i temperaturom tarnih obloga υ. Model trenja spojke je reset-integrator tipa s modifikacijom koja se odnosi na varijabilnu normalnu silu. Iznos momenta Coulombovog trenja spojke računa se iz poznatog efektivnog polumjera spojke, normalne sile Fapp i koeficijenta trenja μ. Koeficijent trenja μ određuje se iz mape s ulaznim varijablama brzine klizanja, normalne sile i temperature (Sl. 3a). Temperatura υ dobiva se iz termodinamičkog nelinearnog modela prvog reda zasnovanog na prvom glavnom stavku termodinamike. Ključni dio modela jest mapa koeficijenta izmjene topline (Sl. 3b), koja za ulaze ima brzinu klizanja i normalnu silu. Koeficijent izmjene topline također uključuje eksperimentalno identificiranu dinamiku opisanu serijskim spojem transportnog kašnjenja i P1 clana, kako bi se povećala dinamička točnost modela (vidjeti ilustraciju na Sl. 4).
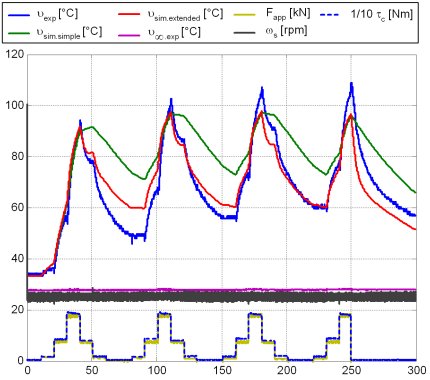
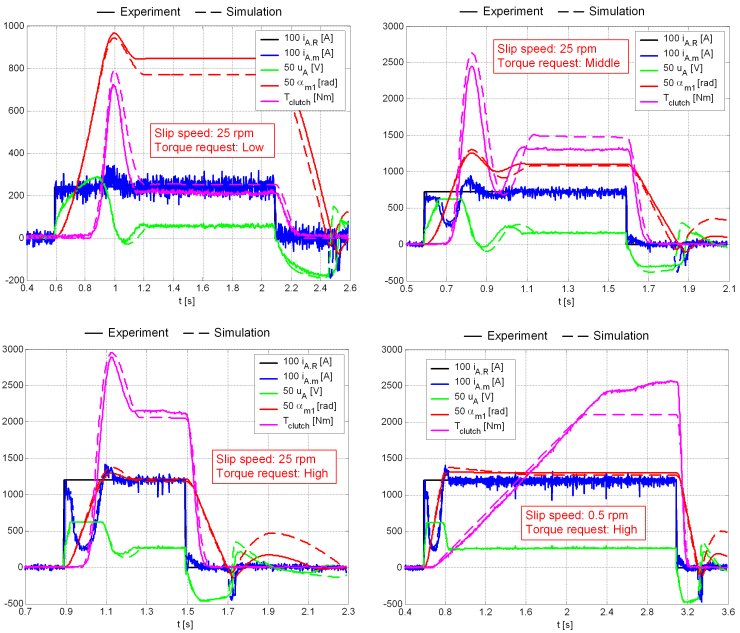
Slika 5 prikazuje rezultate eksperimentalne provjere cjelokupnog modela spojke s obzirom na skokovite promjene referentne struje istosmjernog motora. Model vjerno opisuje krajne nelinearnu dinamiku spojke, koja je karakterizirana početnim mrtvim vremenom zbog slobodnog hoda spojke, prijelaznim odzivom s nadvišenjem zbog trenja i elasticnosti prijenosnog mehanizma, relativno brzim odzivom otvaranja spojke s "poskakivanjem" oko krajnjeg položaja i sporim odzivom pri malim brzinama klizanja zbog torzijske elastičnosti spojnih vratila (poluvratila).
Više detalja o strukturi, identifikaciji i validaciji modela može se naći u dolje navedenim publikacijama.