Dinamički potencijal trenja autogume
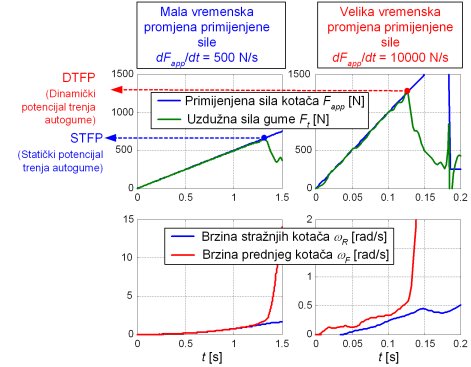
Sustavi regulacije vuče i ABS imaju zadatak držanja uzdužne sile autogume na maksimalnom statičkom potencijalu trenja, kako bi se postigla maksimalna akceleracija, odnosno deceleracija. Eksperimentalni rezultati dobiveni uz korištenje eksperimentalnog električnog vozila s motorom ugrađenim u kotaču, prikazani na slici 1, pokazuju da uzdužna sila autogume za vrijeme naglih prijelaznih pojava momenta kotača može biti nekoliko puta veca od statičkog potencijala. Ovaj se učinak nazvao dinamički potencijal trenja autogume (engl. Dynamic Tire Friction Potential, DTFP).
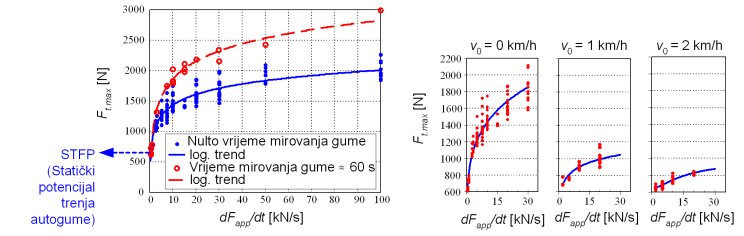
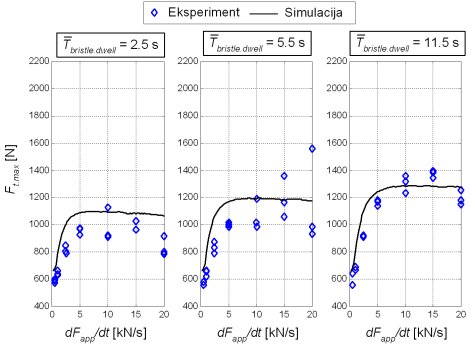
Slika 2 prikazuje vrijednosti DTFP-a za testove u ledenoj dvorani i razne radne parametre. DTFP značajno raste s povećanjem vremenske promjene primijenjene sile (momenta) u području dFapp/dt < 15000 N/s. DTFP se dodatno povećava u slučaju da guma miruje na ledenoj podlozi određeno vrijeme prije nagle primjene sile, što se objašnjava učinkom utiskivanja gume u led. DTFP se pojavljuje samo kod malih brzina vozila.
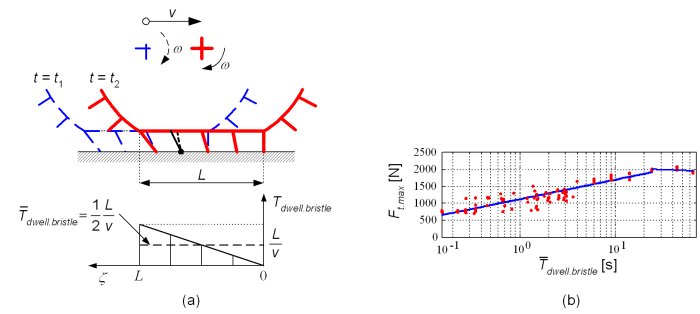
Temeljem uočenog utjecaja vremena mirovanja gume i vlaknastog modela gume na slici 3a, postavljenja je hipoteza da ovisnosti DTFP-a o brzini vozila i promjeni primijenjene sile dolaze od učinka vremena mirovanja vlakana. Čak i za nulto vrijeme mirovanja gume, vrijeme mirovanja vlakana u kontaktnoj plohi između gume i podloge veće je od nule. Povećanjem brzine vozila pada prosjecno vrijeme mirovanja vlakana, te pada i DTFP. Također, kod manjih promjena primijenjene sile, guma se otkotrljava iz svoje inicijalne kontaktne plohe, gubeći tako vrijeme mirovanja vlakana i DTFP. Slika 3b pokazuje da je prosječno vrijeme mirovanja vlakana iznosa od nekoliko sekundi dovoljno da značajno poveća DTFP.
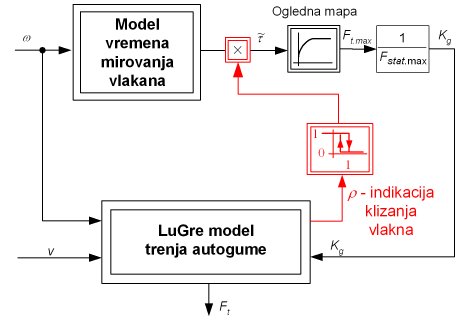
Temeljem navedene hipoteze o prosječnom vremenu mirovanja vlakana, ponašanje DTFP-a opisano je dinamičkim modelom trenja autogume, prikazanim principnim blokovskim dijagramom na slici 4. Prethodno razvijeni LuGre model trenja autogume s distribuiranim parametrima proširen je s modelom prosječnog vremena mirovanja vlakana (također s distribuiranim parametrima) s ciljem opisivanja DTFP učinka. Postavljena je i verzija modela s koncentriranim parametrima. Prosječno vrijeme mirovanja vlakana ![]() koristi se za mapiranje maksimalne statičke sile trenja. Ako pojedino vlakno počne proklizavati, njegova se varijabla stanja vremena mirovanja resetira na nulu (
koristi se za mapiranje maksimalne statičke sile trenja. Ako pojedino vlakno počne proklizavati, njegova se varijabla stanja vremena mirovanja resetira na nulu (![]() = 0). Slično tome, stanje vremena mirovanja treba se resetirati i ako kotrljajuća guma prenosi uzdužnu silu (nije prikazano na Sl. 4).
= 0). Slično tome, stanje vremena mirovanja treba se resetirati i ako kotrljajuća guma prenosi uzdužnu silu (nije prikazano na Sl. 4).
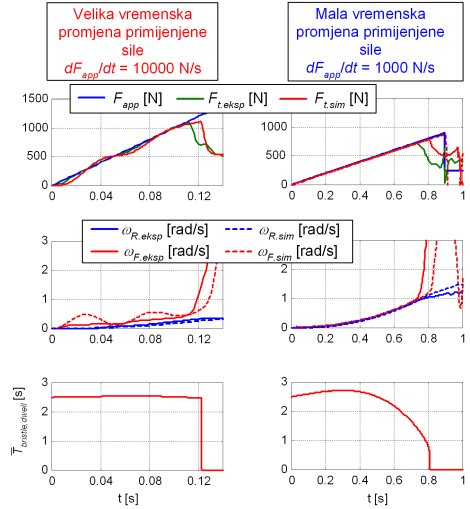
Rezultati eksperimentalne provjere na slikama 5 i 6 pokazuju da predloženi model dinamike trenja autogume (Sl. 4) točno opisuje vremenski odziv autogume i odgovarajuću karakteristiku DTFP-a u funkciji vremenske promjene primijenjene sile.
Publikacije
-
Vehicle System Dynamics, Vol. 49, No. 10, pp. 1623-1647, 2011. -
An In-Wheel Motor-Based Tyre Test Vehicle
International Journal of Vehicle System Modelling and Testing, Vol. 2, No. 3, pp. 252-275, 2007. -
Experimental Identification and Modeling of Dynamic Tire Friction Potential on Slippery Surfaces
XIX IAVSD Symposium, Berkeley, CA, 2007. -
Experimental Identification of Dynamic Tire Friction Potential on Ice Surfaces
XIX IAVSD Symposium, Milan, Italy, Aug/Sep 2005; Aug/Sep 2005; Vehicle System Dynamics, Vol. 44, Supplement 1, pp. 93-103, 2006. -
Modeling of Dynamic Tire Friction Potential on Ice Surfaces
Proceedings of 2006 ASME International Mechanical Engineering Congress and Exposition (IMECE 2006), Chicago, IL, 2006. -
An Experimental Electrical Vehicle with In-wheel Motor
CD Proc. of 13th Int. Conference on Electrical Drives and Power Electronics (EDPE 2005), Dubrovnik, Croatia, 2005. -
Experimental Analysis and Modeling of Longitudinal Tire Friction Dynamics for Abrupt Transients
3rd International Tyre Colloquium , 2004. -
Traction Control Using Dynamic Tire Friction Potential [open access]
US patent No. US20070213912A1, 2007. -
Modeliranje i regulacija elemenata pogona vozila s izraženim učincima trenja [open access]
Doktorski rad, Fakultet strojarstva i brodogradnje, Sveučilište u Zagrebu, 2010.